vor ca. 9 Jahren hatte ich Teile aus einem Wittenberger Kopf erstanden.
Es hatte eine Weile gedauert, bis ich das Pult zusammen hatte. Lange fehlte mir noch ein Führetrbremsventil. Und die Software brauchte auch eine Weile, von der Elektronik ganz zu schweigen.
Und dann? Dann stand es in der Ecke. Noch nicht mal bei mir zuhause. Ich war damit generell unzufrieden. Die Elektronik war zu langsam. Die Konstruktion sauschwer und durch das schere Bremsventil begann sich das Pult zu biegen. Die Konstruktion war nämlich aus Holz.
Die Elektronik bestand nur aus I²C-Bus Komponenten. Alle Eingänge und Ausgänge waren mit I²C-Bus Portexpandern, AD-Wandlern und Servotreibern versehen. Die Eingänge musste ich also regelmäßig nach ihrem Status abfragen. Die Anbindung an den PC war über einen RS232-I²C-Wandler realisiert. Die RS232-Schnittstelle bediente ich mit einem VB6.0 Programm. Das redete dann weiter mit dem Simulator. Das Konzept war viel zu langsam.
Nach etlichen Jahren habe ich das Teil zu mir geholt und neu konstruiert. Das Gestell ist diesmal aus Alu. Über I²C-Bus werden nun nur noch Ausgänge versorgt. Eingänge werden als Joystick oder Tastatur an den PC Angeschlossen.
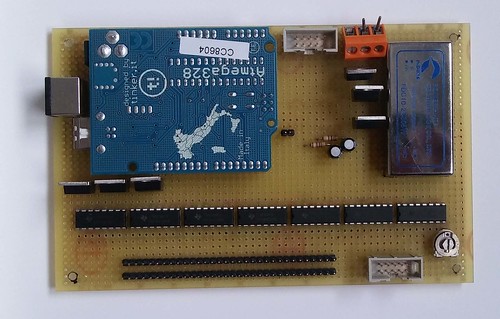
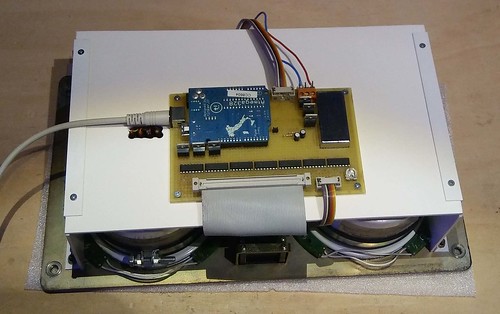
Für die Ausgänge kommt nun ein Arduino mit Ethernet-Shield zum Einsatz. Dieser Verbindet sich mit dem TCP-Server (Loksim3D) oder später auch mit Zusi3.
Die Eingaben werden über zwei Arduino Leonardo getätigt. Beide sind als Joystick programmiert. Weil Loksim derzeit nur einen Joystick unterstützt, ist einer zusätzlich auch als Tastatur konfiguriert.
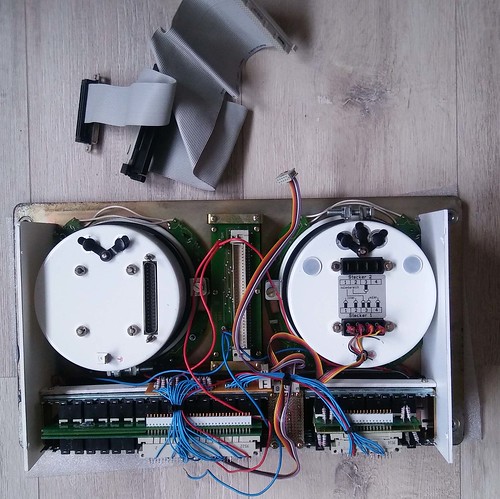
Die Manomter sind mit meinen bekannten I²C-Stoppschild-Platinen ausgestattet. Eine ist im großen Manometer verbaut. Die Andere ist auf der Rückseite des großen Manometers und über Kabel mit den Motoren in den kleinen Manometern verbunden.
Tacho und Kraft werden ebenfalls durch einen Arduino betrieben. Dieser aber als I²C-Bus Teilnehmer. Er ist auf der Rückseite des Tachos mit einer zusätzlichen Lochrasterplatine verbaut.
Die Leuchtmelder werden noch mit der alten Platine aus der vorigen Lösung versorgt. Die würde ich auch langfristig behalte, wenn sie dimmbar wären. Langfristig kommt da ein Arduino Mega hin.
Das EBuLa ist ein Kassenmonitor mit EBuLa-Front.

Das alte Fahrpult

Das neue Gestell

Erster Eindruck mit Elementen.
Was dem Gestell hier noch fehlt ist eine Halterung für den Hilfsfahrschalter, rechts.

Alu-Profil
Einige Verbindungsstücke für die Alu-Profile habe ich im 3D-Drucker erstellt.

Kunststoffverkleidung
Die Ober- und Unterseite habe ich mit Kunststoff verkleidet. Das Material habe ich heiß abgekantet. Dann grundiert und gestrichen. Hier liegen sie teilweise nur auf.
Im Hintergrund ist Unordnung und das alte Gestell.

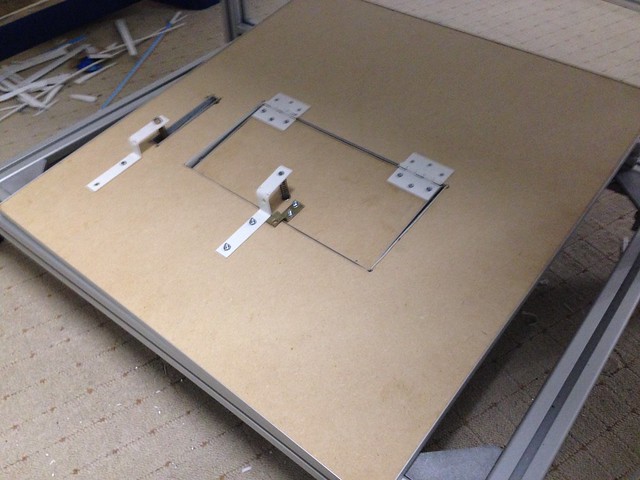

Vorbereitung für die Pedale
Für das Sifa-Pedal brauche ich MDF, Alu-Winkel-Leisten, PVC-Boden und ein bisschen Mechanik.

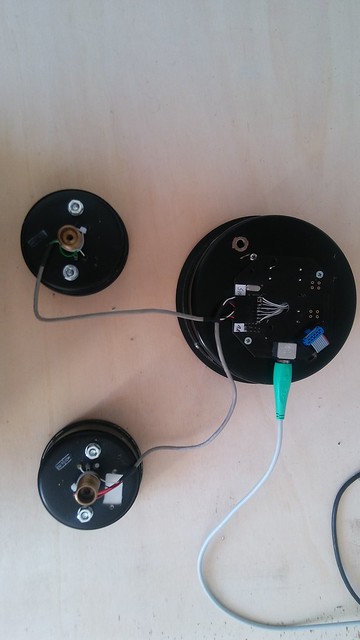
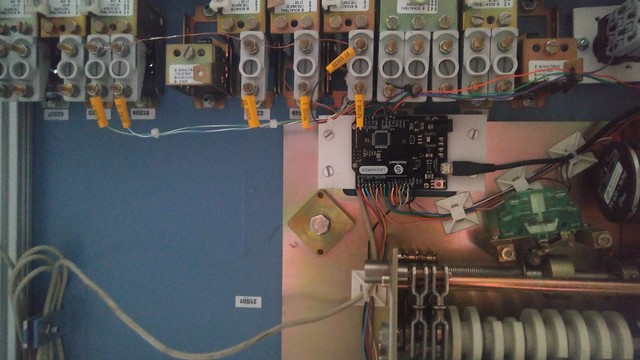
Die Anzeige-Elektronik im Überblck.


Der Arduino am Tacho.
Der grüne Stecker ist der I²C-Bus. Den realisiere ich immer über Mini-DIN-Buchsen wie die für PS2- Mäuse und Tastaturen.
Die Widerstände und Gleichrichterdioden im inneren des Tachos habe ich entfernt. Das Finetuning kommt nun mit den Potis auf der Platine.
Die PWM-Ausgänge des Arduino arbeiten mit 1kHz. Das ist über das Drehspulmesswerk gut hörbar. Darum ist noch ein Elektrolyt-Kondensator parallel geschaltet, im das zu dämpfen.
Für das Kraft-Instrument sind zwei Elektrolyt-Kondensatoren verpolt in Reihe notwendig, um eine bipolaren Kondensator zu erhalten.
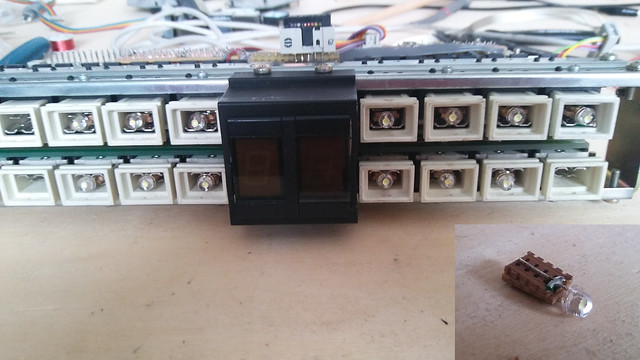


Der Leuchtmelderblock
Als Leuchtmittel kommen selbstverständlich LEDs zum Einsatz. Dabei nehme ich für rote und gelbe LMs warmweiße LEDs und für alle Anderen kaltweiße LEDs.
Setzt man zwei Streifen einer Loch- oder Streifenrasterplatine Rücken an Rücken übereinander und verlötet das zwischen die Drähte einer LED, passt das Konstrukt perfekt in die Glühlampenhalterung.
Die Rückseite der Manometer
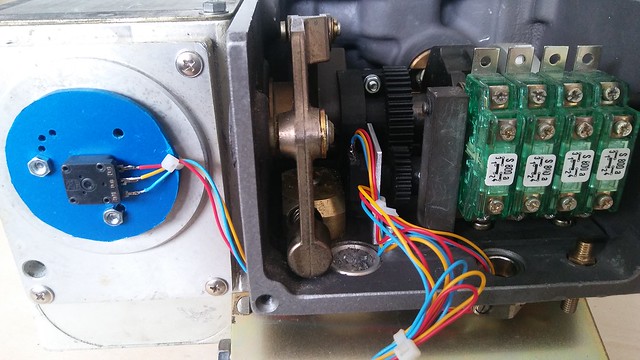

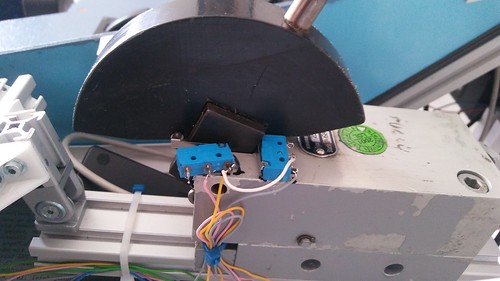
Zwei Potis am Bremsventil
Bessere Bilder habe ich leider nicht gemacht, bevor ich das Ventil eingebaut habe. Links an der E-Bremse war vorher ein riesiges Drahtpotentiometer.
Am pneumatischen Teil fehlte mir eine Mechanische Verbindungsmöglichkeit für ein Poti. Danke an Uwe Klein für die Hilfe mit den Zahnrädern, über die die Drehbewegung auf eine Poti gelenkt wird.
Die Elektrische Verbindung nach außen erfolgt nun über einen 9-Poligen Sub-D-Stecker.

Linkes Tastenfeld
Das blaue Kabel geht zu den Pedalen.
Mittleres Feld
Die Aufnahme ist zugegeben nicht so toll. Rechts das Poti für den Z-Bereich des Kombihebels. Unten Teile der Nockenschalter des Fahrschalters. Rechts Oben, der nicht mehr originale Türschalter.

Probefahrt
Das Pult ist mittlerweile in die Wohnung gewandert. Diese Probefahrt fand mit Loksim3D statt.
Für den Fall, dass ich irgend wann einen echten Sitz erstehe werden, habe ich das Pult recht hoch gebaut. Das ist jetzt, wo ich mit Ikea-Stuhl Fahren problematisch. So musste ich mir ein Podest bauen.